
“ฉันกำลังมองหาซื้อเซลล์โหลด 6 DOF และรู้สึกประทับใจกับตัวเลือกโปรไฟล์ต่ำของ Sunrise” ผู้เชี่ยวชาญด้านการวิจัยการฟื้นฟูสมรรถภาพ

ที่มาของภาพ: ห้องปฏิบัติการนิวโรไบโอนิกส์ มหาวิทยาลัยมิชิแกน
ด้วยความก้าวหน้าของปัญญาประดิษฐ์ นักวิจัยในอเมริกาเหนือและยุโรปมีความก้าวหน้าอย่างน่าประทับใจในการวิจัยและพัฒนาการฟื้นฟูสมรรถภาพทางการแพทย์ หนึ่งในนั้นคือขาเทียมอัจฉริยะ (ขาเทียมหุ่นยนต์) ซึ่งได้รับความสนใจอย่างมาก หนึ่งในองค์ประกอบสำคัญของขาเทียม AI คือหน่วยควบคุมแรง ขาเทียมแบบดั้งเดิมจะรองรับผู้ใช้งานในลักษณะคงที่ ดังนั้นแขนขาและส่วนอื่นๆ ของร่างกายจึงมักต้องทำงานร่วมกับขาเทียมแบบแข็งเพื่อให้การเคลื่อนไหวสำเร็จ ไม่เพียงแต่ความสามารถในการเคลื่อนไหวจะจำกัดเท่านั้น แต่การเคลื่อนไหวยังไม่ประสานกัน ล้มได้ง่ายและเกิดภาวะแทรกซ้อนแทรกซ้อน ก่อให้เกิดความยากลำบากและความท้าทายมากขึ้นสำหรับผู้ป่วย ขาเทียมหุ่นยนต์แตกต่างจากขาเทียมแบบดั้งเดิมตรงที่ช่วยให้ผู้ใช้ทรงตัวได้อย่างมั่นคงมากกว่าแบบพาสซีฟตามสภาพถนนและการเคลื่อนไหวที่เปลี่ยนแปลงไป ช่วยให้ผู้ใช้งานสามารถเคลื่อนไหวได้อย่างอิสระมากขึ้น และยกระดับคุณภาพชีวิตได้อย่างมาก

ที่มาของภาพ: การออกแบบและการใช้งานทางคลินิกของขาเทียมแบบโอเพนซอร์ส โดย Alejandro F. Azocar วารสาร Nature Biomedical Engineering เล่มนี้
จากสถิติพบว่ามีผู้พิการแขนขาขาดอย่างน้อย 300,000 คนในสหรัฐอเมริกา ในประเทศจีนมีผู้พิการทางร่างกาย 24.12 ล้านคน ในจำนวนนี้ 2.26 ล้านคนเป็นผู้พิการแขนขาขาด และมีเพียง 39.8% เท่านั้นที่ได้รับการใส่ขาเทียม สถิติในช่วงสองปีที่ผ่านมาแสดงให้เห็นว่าในประเทศจีนมีการตัดแขนขาใหม่เฉลี่ยประมาณ 200,000 ครั้งต่อปี อันเนื่องมาจากอุบัติเหตุจราจร อุบัติเหตุในโรงงานอุตสาหกรรม อุบัติเหตุในเหมืองแร่ และโรคภัยไข้เจ็บต่างๆ จำนวนการตัดแขนขาเนื่องจากโรคเบาหวานกำลังเพิ่มขึ้นอย่างรวดเร็ว นอกจากนี้ ขาเทียมยังจำเป็นต้องได้รับการเปลี่ยนเมื่ออายุมากขึ้น นอกจากนี้ ผู้ป่วยที่มีภาวะกล้ามเนื้ออ่อนแรง กล้ามเนื้อลีบ หรืออัมพาตครึ่งซีก ยังต้องการอุปกรณ์ทางการแพทย์ เช่น โครงกระดูกภายนอก เพื่อช่วยให้สามารถยืนหรือเคลื่อนไหวได้อีกครั้ง ดังนั้น ขาเทียมอัจฉริยะและโครงกระดูกภายนอกอัจฉริยะที่มีประสิทธิภาพและเชื่อถือได้จึงเป็นที่ต้องการของตลาดและมีความสำคัญทางสังคมอย่างมาก
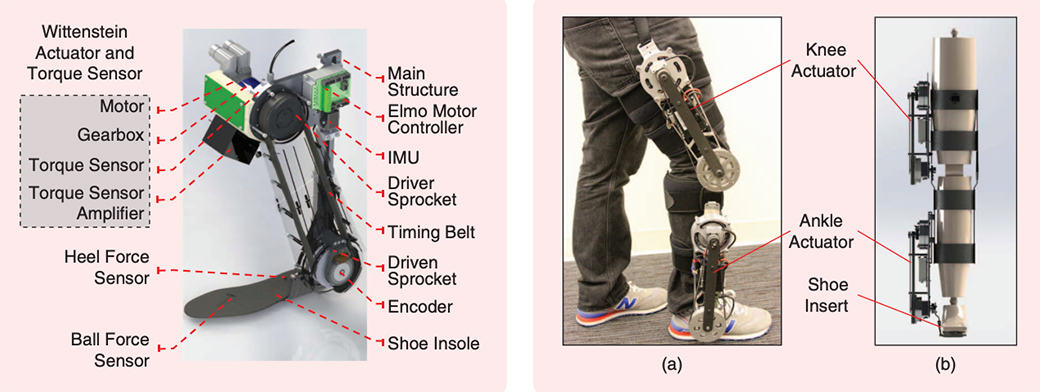
ที่มาของภาพ: ห้องปฏิบัติการระบบควบคุมการเคลื่อนที่ของ UT Dallas
เพื่อควบคุมแรงของขาเทียมอัจฉริยะ จำเป็นต้องใช้เซ็นเซอร์แรง 6 DOF เพื่อตรวจจับการเปลี่ยนแปลงของสภาพถนนแบบเรียลไทม์และควบคุมขนาดของแรงได้อย่างแม่นยำ ความซับซ้อนของสภาพถนน ความแปรปรวนของการกระทำ และข้อจำกัดในการผสานรวม ทำให้เซ็นเซอร์แรง 6 DOF มีความต้องการสูงมาก ไม่เพียงแต่ต้องเป็นไปตามข้อกำหนดด้านช่วงแรงและโมเมนต์เท่านั้น แต่ยังต้องมีน้ำหนักเบาและบางอีกด้วย ผู้ใช้กล่าวว่าหลังจากการตรวจสอบพบว่าในตลาด มีเพียงเซ็นเซอร์แรง 6 DOF ซีรีส์บางเฉียบ SRI M35 เท่านั้นที่สามารถตอบสนองความต้องการเหล่านี้ได้ทั้งหมด
ซีรีส์ M35 ประกอบด้วย 18 รุ่น ซึ่งทุกรุ่นมีความหนาน้อยกว่า 1 ซม. และรุ่นที่เล็กที่สุดมีความหนาเพียง 7.5 มม. น้ำหนักทั้งหมดน้อยกว่า 0.26 กก. และน้ำหนักเบาที่สุดเพียง 0.01 กก. ความไม่เชิงเส้นและฮิสเทอรีซิสอยู่ที่ 1% ครอสทอล์คน้อยกว่า 3% และสร้างขึ้นด้วยเทคโนโลยีเกจวัดความเครียดแบบสตีลออนฟอยล์โลหะ ประสิทธิภาพที่ยอดเยี่ยมของเซ็นเซอร์ที่บาง น้ำหนักเบา และกะทัดรัดเหล่านี้เกิดขึ้นได้จากประสบการณ์การออกแบบ 30 ปีของ SRI ซึ่งเริ่มต้นจากหุ่นจำลองการชนเพื่อความปลอดภัยในรถยนต์และขยายขอบเขตออกไป เทคโนโลยีเหล่านี้กำลังถูกนำมาใช้ในการวิจัยและพัฒนาอุปกรณ์เทียมอัจฉริยะเพื่อรักษาความปลอดภัยให้กับผู้คนมากขึ้น
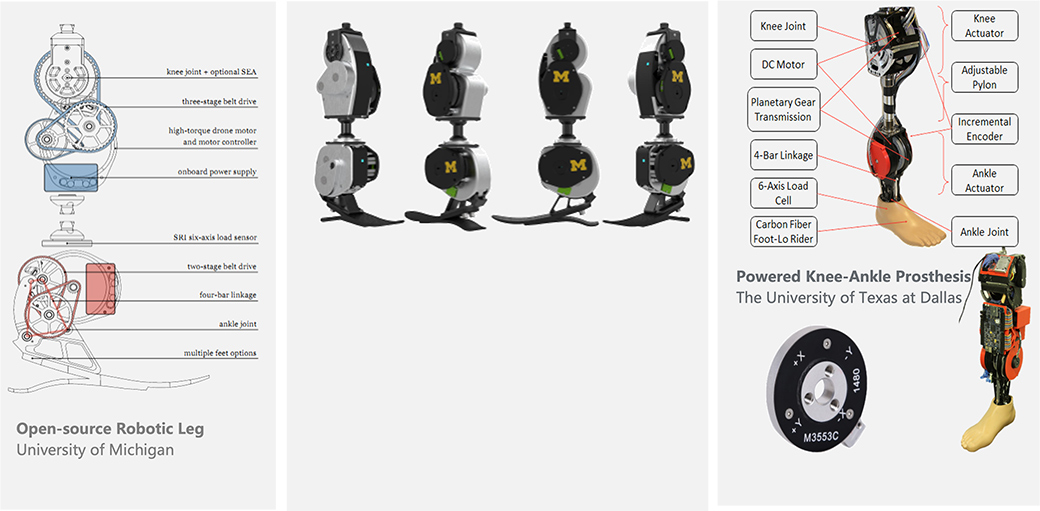
ที่มาของภาพ: ห้องปฏิบัติการระบบประสาทชีวภาพ มหาวิทยาลัยมิชิแกน ห้องปฏิบัติการระบบควบคุมการเคลื่อนไหว
นอกจากนี้ ราคาของเซ็นเซอร์ SRI ยังมีการแข่งขันสูงมากเมื่อเทียบกับผู้ผลิตเซ็นเซอร์แรงรายใหญ่รายอื่นๆ ด้วยความแข็งแกร่งทางเทคนิคและราคาที่เข้าถึงได้ แบรนด์ SRI ที่เรียบง่ายนี้จึงได้รับการบอกต่อแบบปากต่อปากและได้รับความนิยมอย่างสูงจากห้องปฏิบัติการวิจัยฟื้นฟูสมรรถภาพทางการแพทย์ชั้นนำและอุตสาหกรรมหุ่นยนต์เทียม ในช่วง 7 ปีที่ผ่านมา นักวิจัยและวิศวกรด้านชีวกลศาสตร์และชีวอิเล็กทรอนิกส์จากสหรัฐอเมริกา จีน แคนาดา ญี่ปุ่น อิตาลี สเปน และประเทศอื่นๆ ได้นำเซ็นเซอร์ SRI ขนาดบางเฉียบมาใช้เพื่อการวิจัยเชิงนวัตกรรม ตีพิมพ์บทความวิชาการจำนวนมาก และประสบความสำเร็จอย่างโดดเด่น
ในบทความต่อไป เราจะแนะนำการประยุกต์ใช้ SRI M35 ultra-thin series ในด้านการฟื้นฟูสมรรถภาพทางการแพทย์ รวมถึงผลการวิจัยล่าสุดเกี่ยวกับขาเทียมอัจฉริยะและโครงกระดูกภายนอกอัจฉริยะที่ตีพิมพ์ในวารสาร Nature และ IEEE conference โปรดติดตาม!
อ้างอิง:
1. จำนวนผู้ป่วยและการประมาณการอื่นๆ ของขาเทียมและอุปกรณ์พยุงข้อในสหรัฐอเมริกา โดย Maurice A. LeBlanc, MS, CP
2. การออกแบบและการใช้งานทางคลินิกของขาเทียมแบบโอเพนซอร์ส โดย อเลฮานโดร เอฟ. อาโซคาร์ วารสาร Nature Biomedical Engineering เล่มที่
3. การออกแบบและการตรวจสอบความถูกต้องของอุปกรณ์พยุงข้อเข่าและข้อเท้าแบบขับเคลื่อนด้วยแรงบิดสูง Hanqi Zhu, การประชุมนานาชาติ IEEE เรื่องหุ่นยนต์และระบบอัตโนมัติ (ICRA) ปี 2017