
"אני מחפש לרכוש תא עומס של 6 DOF והתרשמתי מהאפשרויות הנמוכות של Sunrise." ---- מומחה למחקר שיקום

מקור תמונה: מעבדת הנוירוביוניקה של אוניברסיטת מישיגן
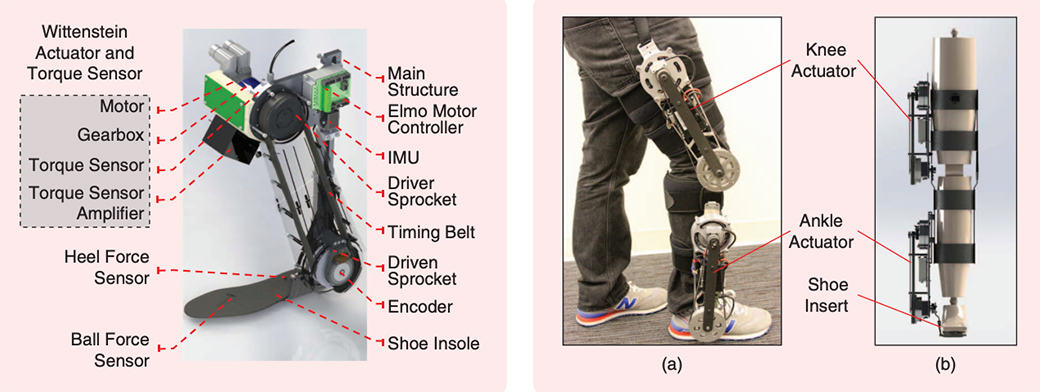
עם עליית הבינה המלאכותית, חוקרים בצפון אמריקה ובאירופה עשו התקדמות מרשימה במחקר ופיתוח של שיקום רפואי. ביניהן, תותבות בעלות אינטליגנציה מלאכותית (תותבות רובוטיות) משכו תשומת לב רבה. אחד המרכיבים המרכזיים של תותבות בינה מלאכותית הוא יחידת בקרת הכוח. התותבת המסורתית תומכת במשתמש באופן קבוע, כך שגפיים וחלקי גוף אחרים של המשתמש צריכים לעתים קרובות לשתף פעולה עם התותבת הנוקשה כדי להשלים את הפעולה. לא רק שיכולת התנועה מוגבלת, אלא גם התנועה אינה מתואמת. קל ליפול ולפתח סיבוכים משניים, מה שיוצר קשיים ואתגרים נוספים עבור המטופלים. בשונה מתותבות מסורתיות, תותבות רובוטיות יכולות לספק למשתמשים תמיכה אקטיבית ולא פסיבית באיזון בהתאם לשינויים בתנאי הדרך והתנועות, מה שמאפשר להם לפעול בחופשיות רבה יותר ולשפר את איכות חייהם באופן משמעותי.

מקור תמונה: תכנון ויישום קליני של רגל ביונית בקוד פתוח, Alejandro F. Azocar. כרך Nature Biomedical Engineering.
על פי הסטטיסטיקה, ישנם לפחות 300,000 קטועי גפיים בארה"ב. בסין ישנם 24.12 מיליון אנשים עם מוגבלויות פיזיות, מתוכם 2.26 מיליון קטועי גפיים, ורק 39.8% קיבלו תותבות. סטטיסטיקות בשנתיים האחרונות מראות שבסין מספר הקטיעות החדשות הממוצע השנתי עומד על כ-200,000 עקב תאונות דרכים, תאונות תעשייתיות, תאונות כרייה ומחלות. מספר הקטיעות עקב סוכרת גדל במהירות. יש צורך להחליף גם גפיים תותבות עם הגיל. בנוסף, חולים עם חולשת שרירים, ניוון שרירים או שיתוק בשתיק זקוקים גם הם לעזרה רפואית כמו שלדים חיצוניים כדי לעזור להם לעמוד או לנוע שוב. לכן, תותבות חכמות יעילות ואמינות יותר ולשלדים חיצוניים חכמים יש ביקוש רב בשוק ומשמעות חברתית.
מקור תמונה: מעבדת מערכות בקרת תנועה של אוניברסיטת אוניברסיטת דאלאס
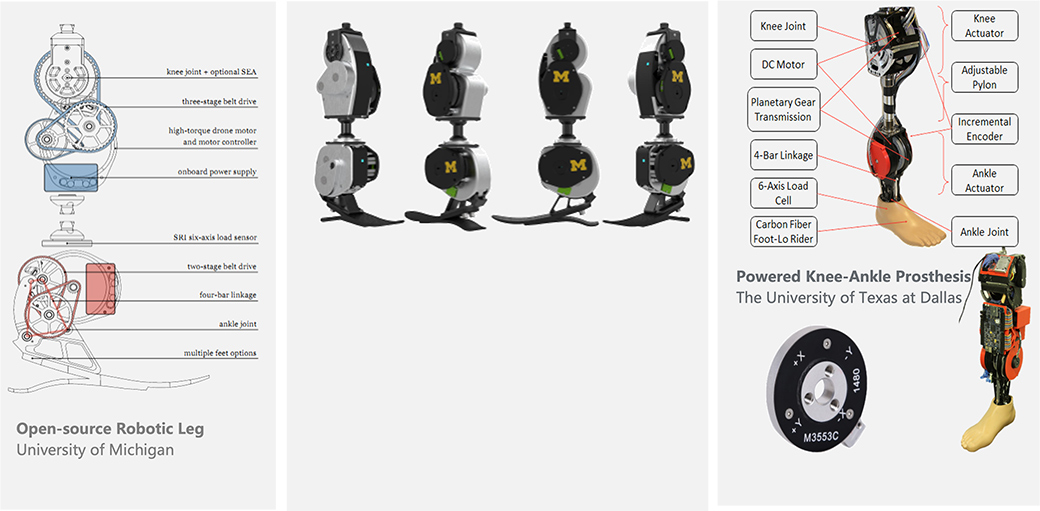
כדי לממש את בקרת הכוח של תותבות חכמות, נדרשים 6 חיישני כוח DOF כדי לחוש שינויים בתנאי הדרך בזמן אמת ולשלוט במדויק בגודל הכוח. מורכבות תנאי הדרך, השונות בפעולות ואילוצי האינטגרציה מציבים דרישות גבוהות מאוד לחיישני כוח DOF של 6. לא רק שעליהם לעמוד בדרישות הטווח של כוח ומומנט, אלא גם להיות קלים ודקים. משתמשים אמרו שלאחר בדיקה, הם גילו שבשוק, רק חיישני כוח SRI M35 מסדרה דקה במיוחד עם 6 DOF יכולים לעמוד בכל הדרישות הללו.
סדרת M35 כוללת 18 דגמים, כולם בעובי של פחות מ-1 ס"מ, והקטן ביותר בעובי של 7.5 מ"מ בלבד. המשקולות כולן פחות מ-0.26 ק"ג, והקל ביותר הוא רק 0.01 ק"ג. אי-לינאריות והיסטרזיס הן 1%, מעבר דיבור פחות מ-3% והם בנויים בטכנולוגיית מד מאמץ מסוג פלדה על נייר מתכת. הביצועים המצוינים של חיישנים דקים, קלים וקומפקטיים אלה ניתנים להשגה הודות ל-30 שנות ניסיון בתכנון של SRI, שמקורו בבובה של תאונות בטיחות ברכב ומתרחב מעבר לכך. טכנולוגיות אלו משמשות כעת במחקר ופיתוח של תותבות חכמות כדי ללוות את בטיחותם של יותר אנשים.
מקור תמונה: מעבדת נוירוביוניקה של אוניברסיטת מישיגן, מעבדת מערכות בקרה של תנועה
בנוסף, מחיר חיישני SRI תחרותי מאוד בהשוואה לאלו של יצרני חיישני כוח גדולים אחרים. בזכות חוזקו הטכני החזק ומחירו המשתלם, מותג SRI הצנוע התפשט מפה לאוזן והוא אהוב מאוד על ידי מעבדות מחקר שיקום רפואי מובילות ותעשיית התותבות הרובוטיות. בשבע השנים האחרונות, חוקרים ומהנדסים בתחום הביוניקה והביומכניקה מארצות הברית, סין, קנדה, יפן, איטליה, ספרד ומדינות אחרות השתמשו בחיישני SRI דקים במיוחד למחקר חדשני, פרסמו מספר רב של מאמרים אקדמיים והשיגו התקדמות יוצאת דופן.
במאמר הבא נציג את היישום של סדרת SRI M35 הדקה במיוחד בתחום השיקום הרפואי. כולל תוצאות המחקר האחרונות של תותבות חכמות ושלד חיצוני חכמות שפורסמו בכתבי עת של Nature ו-IEEE. הישארו מעודכנים!
הַפנָיָה:
1. אוכלוסיית המטופלים ואומדנים אחרים של פרוטזות ואורתוטיקה בארה"ב, מוריס א. לה-בלאן, MS, CP
2. תכנון ויישום קליני של רגל ביונית בקוד פתוח, אלחנדרו פ. אזוקאר. כרך Nature Biomedical Engineering.
3. תכנון ותיקוף של אורתוזיס ברך-קרסול בעל דחיסות מומנט וניתן להנעה לאחור גבוהה. האנקי ג'ו, כנס IEEE הבינלאומי לרובוטיקה ואוטומציה (ICRA) 2017