
“Tôi đang muốn mua một cảm biến lực 6 DOF và rất ấn tượng với các tùy chọn cấu hình thấp của Sunrise.”----một chuyên gia nghiên cứu phục hồi chức năng

Nguồn hình ảnh: Phòng thí nghiệm thần kinh sinh học của Đại học Michigan
Với sự phát triển của trí tuệ nhân tạo, các nhà nghiên cứu ở Bắc Mỹ và Châu Âu đã đạt được những tiến bộ ấn tượng trong nghiên cứu và phát triển phục hồi chức năng y tế. Trong số đó, các bộ phận giả thông minh nhân tạo (bộ phận giả robot) đã thu hút được nhiều sự chú ý. Một trong những thành phần quan trọng của bộ phận giả AI là bộ phận kiểm soát lực. Bộ phận giả truyền thống hỗ trợ người dùng một cách cố định, vì vậy các chi và bộ phận cơ thể khác của người dùng thường cần phải phối hợp với bộ phận giả cứng để hoàn thành hành động. Không chỉ khả năng di chuyển bị hạn chế mà chuyển động còn không đồng bộ. Dễ bị ngã và phát triển các biến chứng thứ cấp, tạo ra nhiều khó khăn và thách thức hơn cho bệnh nhân. Khác với các bộ phận giả truyền thống, bộ phận giả robot có thể cung cấp cho người dùng sự hỗ trợ cân bằng chủ động thay vì thụ động theo sự thay đổi của điều kiện đường xá và chuyển động, cho phép họ hoạt động tự do hơn và cải thiện đáng kể chất lượng cuộc sống.

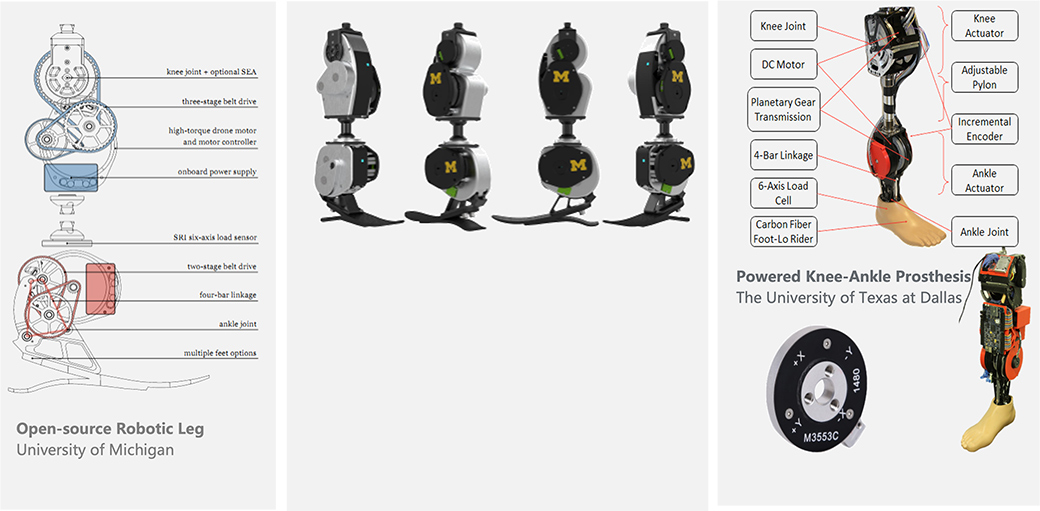
Nguồn hình ảnh: Thiết kế và triển khai lâm sàng chân sinh học nguồn mở, Alejandro F. Azocar. Tập san Kỹ thuật Y sinh Tự nhiên.
Theo thống kê, có ít nhất 300.000 người bị cụt chi ở Hoa Kỳ. Tại Trung Quốc, có 24,12 triệu người khuyết tật vận động, trong đó có 2,26 triệu người bị cụt chi và chỉ có 39,8% được lắp chân tay giả. Thống kê trong hai năm qua cho thấy tại Trung Quốc, số ca cắt cụt chi mới trung bình hàng năm là khoảng 200.000 do tai nạn giao thông, tai nạn lao động, tai nạn khai thác mỏ và bệnh tật. Số ca cắt cụt chi do bệnh tiểu đường đang tăng nhanh chóng. Chân tay giả cũng cần được thay thế khi họ già đi. Ngoài ra, những bệnh nhân bị yếu cơ, teo cơ hoặc liệt nửa người cũng cần các thiết bị hỗ trợ y tế như bộ xương ngoài để giúp họ đứng dậy hoặc di chuyển trở lại. Do đó, các bộ phận giả thông minh và bộ xương ngoài thông minh hiệu quả và đáng tin cậy hơn có nhu cầu thị trường và ý nghĩa xã hội lớn.
Nguồn hình ảnh: Phòng thí nghiệm hệ thống điều khiển vận động của UT Dallas
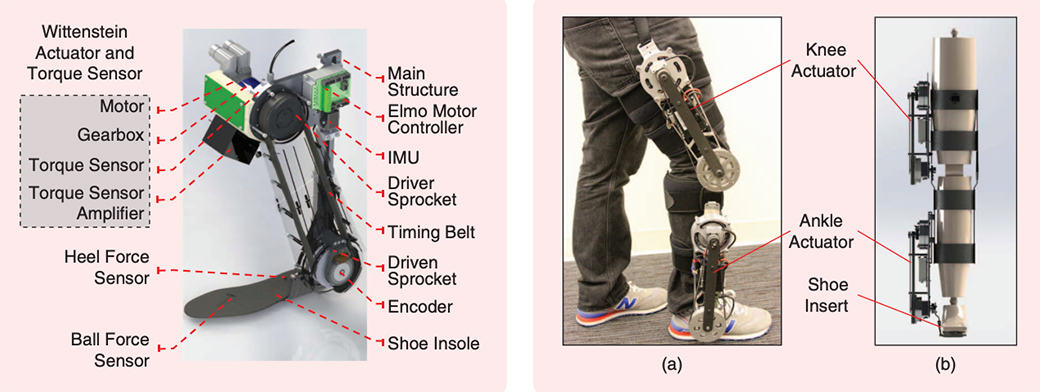
Để hiện thực hóa khả năng kiểm soát lực của chân tay giả thông minh, cần có cảm biến lực 6 DOF để cảm nhận những thay đổi về điều kiện đường xá theo thời gian thực và kiểm soát chính xác biên độ của lực. Sự phức tạp của điều kiện đường xá, tính biến thiên của các tác động và các ràng buộc tích hợp đặt ra những yêu cầu rất cao đối với cảm biến lực 6 DOF. Cảm biến này không chỉ phải đáp ứng các yêu cầu về phạm vi lực và mô men mà còn phải nhẹ và mỏng. Sau khi tìm hiểu, người dùng cho biết trên thị trường, chỉ có cảm biến lực 6 DOF dòng siêu mỏng SRI M35 mới có thể đáp ứng tất cả các yêu cầu này.
Dòng M35 bao gồm 18 mẫu, tất cả đều có độ dày dưới 1cm, và mẫu nhỏ nhất chỉ dày 7,5mm. Trọng lượng của tất cả các mẫu đều dưới 0,26kg, và mẫu nhẹ nhất chỉ 0,01kg. Độ phi tuyến tính và độ trễ là 1%, nhiễu xuyên âm dưới 3% và được chế tạo bằng công nghệ cảm biến biến dạng lá kim loại. Hiệu suất tuyệt vời của các cảm biến mỏng, nhẹ và nhỏ gọn này có được là nhờ 30 năm kinh nghiệm thiết kế của SRI, bắt nguồn từ mô hình an toàn va chạm ô tô và mở rộng hơn nữa. Những công nghệ này hiện đang được ứng dụng trong nghiên cứu và phát triển chân tay giả thông minh để đảm bảo an toàn cho nhiều người hơn.
Nguồn hình ảnh: Phòng thí nghiệm thần kinh sinh học của Đại học Michigan, phòng thí nghiệm hệ thống điều khiển vận động
Bên cạnh đó, giá cảm biến SRI rất cạnh tranh so với các nhà sản xuất cảm biến lực lớn khác. Với sức mạnh kỹ thuật mạnh mẽ và giá cả phải chăng, thương hiệu SRI đã được lan truyền rộng rãi qua truyền miệng và được các phòng thí nghiệm nghiên cứu phục hồi chức năng y tế hàng đầu và ngành công nghiệp chân tay giả robot yêu thích. Trong 7 năm qua, các nhà nghiên cứu và kỹ sư sinh học và cơ sinh học từ Hoa Kỳ, Trung Quốc, Canada, Nhật Bản, Ý, Tây Ban Nha và các quốc gia khác đã sử dụng cảm biến siêu mỏng SRI cho các nghiên cứu sáng tạo, xuất bản một số lượng lớn các bài báo học thuật và đạt được những tiến bộ đáng kể.
Trong bài viết tiếp theo, chúng tôi sẽ giới thiệu ứng dụng của dòng sản phẩm siêu mỏng SRI M35 trong lĩnh vực phục hồi chức năng y tế. Bao gồm các kết quả nghiên cứu mới nhất về chân tay giả thông minh và bộ xương ngoài thông minh được công bố trên các tạp chí hội nghị Nature và IEEE. Hãy đón đọc!
Thẩm quyền giải quyết:
1. Dân số bệnh nhân và các ước tính khác về chân tay giả và chỉnh hình tại Hoa Kỳ, Maurice A. LeBlanc, MS, CP
2. Thiết kế và triển khai lâm sàng chân sinh học nguồn mở, Alejandro F. Azocar. Tạp chí Kỹ thuật Y sinh Tự nhiên.
3. Thiết kế và Kiểm định Nẹp Chỉnh Hình Đầu Gối-Mắt Cá Chân Có Lực Kéo Mạnh, Độ Ổn Định Cao. Hanqi Zhu, Hội nghị Quốc tế IEEE về Robot và Tự động hóa (ICRA) 2017