
«من به دنبال خرید یک لودسل با ۶ درجه آزادی هستم و تحت تأثیر گزینههای کمحجم Sunrise قرار گرفتم.» ---- یک متخصص تحقیقات توانبخشی

منبع تصویر: آزمایشگاه نوروبیونیک دانشگاه میشیگان
با ظهور هوش مصنوعی، محققان در آمریکای شمالی و اروپا پیشرفت چشمگیری در تحقیق و توسعه توانبخشی پزشکی داشتهاند. در میان آنها، پروتزهای هوشمند مصنوعی (پروتزهای ربات) توجه زیادی را به خود جلب کردهاند. یکی از اجزای کلیدی پروتزهای هوش مصنوعی، واحد کنترل نیرو است. پروتز سنتی از کاربر به صورت ثابت پشتیبانی میکند، بنابراین سایر اندامها و قسمتهای بدن کاربر اغلب برای تکمیل عمل نیاز به همکاری با پروتز سفت و سخت دارند. نه تنها توانایی حرکت محدود است، بلکه حرکت نیز ناهماهنگ است. افتادن و ایجاد عوارض ثانویه به راحتی رخ میدهد و مشکلات و چالشهای بیشتری را برای بیماران ایجاد میکند. پروتزهای رباتیک، برخلاف پروتزهای سنتی، میتوانند با توجه به تغییرات شرایط جاده و حرکات، پشتیبانی تعادل فعال به جای غیرفعال را در اختیار کاربران قرار دهند و به آنها اجازه دهند آزادانهتر عمل کنند و کیفیت زندگی خود را تا حد زیادی بهبود بخشند.

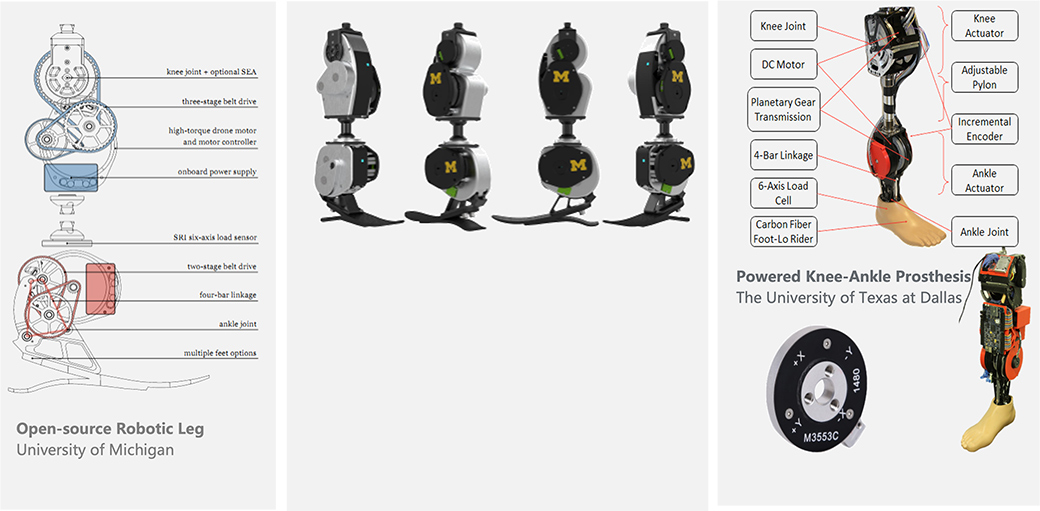
منبع تصویر: طراحی و پیادهسازی بالینی یک پای بیونیک متنباز، آلخاندرو اف. آزوکار. مجله مهندسی زیستپزشکی نیچر.
طبق آمار، حداقل ۳۰۰۰۰۰ نفر در ایالات متحده قطع عضو شدهاند. در چین، ۲۴.۱۲ میلیون نفر معلول جسمی وجود دارد که ۲.۲۶ میلیون نفر از آنها قطع عضو هستند و تنها ۳۹.۸٪ از آنها پروتز دریافت کردهاند. آمار دو سال گذشته نشان میدهد که در چین، میانگین تعداد قطع عضوهای جدید سالانه حدود ۲۰۰۰۰۰ نفر به دلیل تصادفات رانندگی، حوادث صنعتی، حوادث معدن و بیماریها است. تعداد قطع عضو ناشی از دیابت به سرعت در حال افزایش است. اندامهای مصنوعی نیز با افزایش سن نیاز به تعویض دارند. علاوه بر این، بیماران مبتلا به ضعف عضلانی، آتروفی عضلانی یا همیپلژی نیز به کمکهای پزشکی مانند اسکلتهای بیرونی نیاز دارند تا به آنها در ایستادن یا حرکت مجدد کمک کند. بنابراین، پروتزهای هوشمند کارآمدتر و قابل اعتمادتر و اسکلتهای بیرونی هوشمند، تقاضای بازار و اهمیت اجتماعی زیادی دارند.
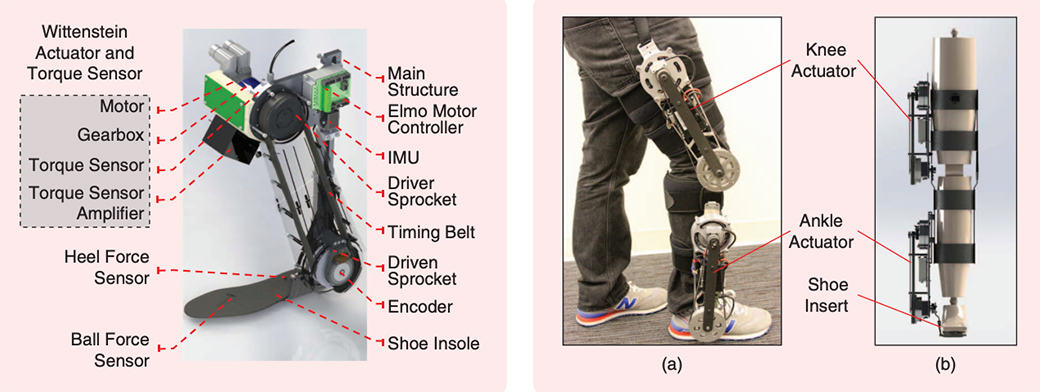
منبع تصویر: آزمایشگاه سیستمهای کنترل حرکتی دانشگاه تگزاس دالاس
برای تحقق کنترل نیرو در پروتزهای هوشمند، به حسگرهای نیرو با 6 درجه آزادی نیاز است تا تغییرات شرایط جاده را به صورت بلادرنگ حس کرده و میزان نیرو را به طور دقیق کنترل کنند. پیچیدگی شرایط جاده، تغییرپذیری اقدامات و محدودیتهای یکپارچهسازی، الزامات بسیار بالایی را برای حسگرهای نیرو با 6 درجه آزادی ایجاد میکند. این حسگرها نه تنها باید الزامات برد نیرو و گشتاور را برآورده کنند، بلکه باید سبک و نازک نیز باشند. کاربران گفتند که پس از بررسی، متوجه شدند که در بازار، فقط حسگرهای نیروی 6 درجه آزادی سری فوق نازک SRI M35 میتوانند تمام این الزامات را برآورده کنند.
سری M35 شامل ۱۸ مدل است که همگی کمتر از ۱ سانتیمتر ضخامت دارند و کوچکترین آنها تنها ۷.۵ میلیمتر ضخامت دارد. وزن همه آنها کمتر از ۰.۲۶ کیلوگرم و سبکترین آنها تنها ۰.۰۱ کیلوگرم است. غیرخطی بودن و هیسترزیس ۱٪، تداخل کمتر از ۳٪ و با فناوری کرنشسنج فویل فلزی ساخته شدهاند. عملکرد عالی این حسگرهای نازک، سبک و جمعوجور به لطف ۳۰ سال تجربه طراحی SRI، که از آدمک تصادف ایمنی خودرو سرچشمه گرفته و فراتر از آن گسترش یافته است، حاصل میشود. این فناوریها اکنون در تحقیق و توسعه پروتزهای هوشمند برای محافظت از ایمنی افراد بیشتر مورد استفاده قرار میگیرند.
منبع تصویر: آزمایشگاه نوروبیونیک دانشگاه میشیگان، آزمایشگاه سیستمهای کنترل حرکتی
علاوه بر این، قیمت حسگرهای SRI در مقایسه با سایر تولیدکنندگان اصلی حسگر نیرو بسیار رقابتی است. با قدرت فنی قوی و قیمت مقرون به صرفه، برند SRI که کمتر شناخته شده است، دهان به دهان پخش شده و عمیقاً مورد علاقه آزمایشگاههای تحقیقاتی توانبخشی پزشکی برتر و صنعت پروتزهای رباتیک است. در 7 سال گذشته، محققان و مهندسان بیونیک و بیومکانیک از ایالات متحده، چین، کانادا، ژاپن، ایتالیا، اسپانیا و سایر کشورها از حسگرهای فوق نازک SRI برای تحقیقات نوآورانه استفاده کردهاند، تعداد زیادی مقاله دانشگاهی منتشر کردهاند و به پیشرفتهای چشمگیری دست یافتهاند.
در مقاله بعدی، کاربرد سری فوق نازک SRI M35 را در حوزه توانبخشی پزشکی معرفی خواهیم کرد. از جمله آخرین نتایج تحقیقات پروتزهای هوشمند و اسکلتهای بیرونی هوشمند که در مجلات کنفرانس Nature و IEEE منتشر شده است. با ما همراه باشید!
مرجع:
۱. جمعیت بیماران و سایر تخمینهای مربوط به پروتزها و ارتزها در ایالات متحده، موریس ای. لبلانک، MS، CP
۲. طراحی و پیادهسازی بالینی یک پای بیونیک متنباز، آلخاندرو اف. آزوکار. مجله مهندسی زیستپزشکی نیچر.
۳. طراحی و اعتبارسنجی یک ارتز زانو-مچ پای برقی با گشتاور متراکم و قابلیت رانش معکوس بالا. هانکی ژو، کنفرانس بینالمللی IEEE در زمینه رباتیک و اتوماسیون (ICRA) 2017