
iGrinder® estas por muelado, polurado kaj senlavado. Ĝi havas vastan gamon da aplikoj en fandejo, aparatara prilaborado kaj nemetala surfactraktado. iGrinder® havas du muelmetodojn: aksa ŝveba fortokontrolo kaj radiala ŝveba fortokontrolo. iGrinder® karakteriziĝas per rapida respondrapido, alta precizeco de fortokontrolo, oportuna uzo kaj alta muelada efikeco. Kompare kun la tradicia robota fortokontrolmetodo, inĝenieroj jam ne bezonas fari komplikajn procedurojn por kontrolo de fortosensiloj. Muellaboro povas rapide komenciĝi post instalado de iGrinder®.
Kontrolo de Aksa Flosanta Forto Ene de la permesita aksa ekspansio kaj kuntiriĝo-intervalo, iGrinder® ĉiam konservas konstantan aksan eliran forton; la aksa flosanta fortokontrolo de iGrinder® integras fortsensilon, delokiĝsensilon kaj inklinsensilon por senti parametrojn kiel muelforton, flosantan pozicion kaj sintenon de la muelkapo en reala tempo. Ĝi havas sendependan kontrolsistemon kaj ne postulas eksterajn programojn por partopreni en la fortkontrolo. Konstanta aksa premo povas esti aŭtomate konservata sendepende de la muelpozicio de la roboto.
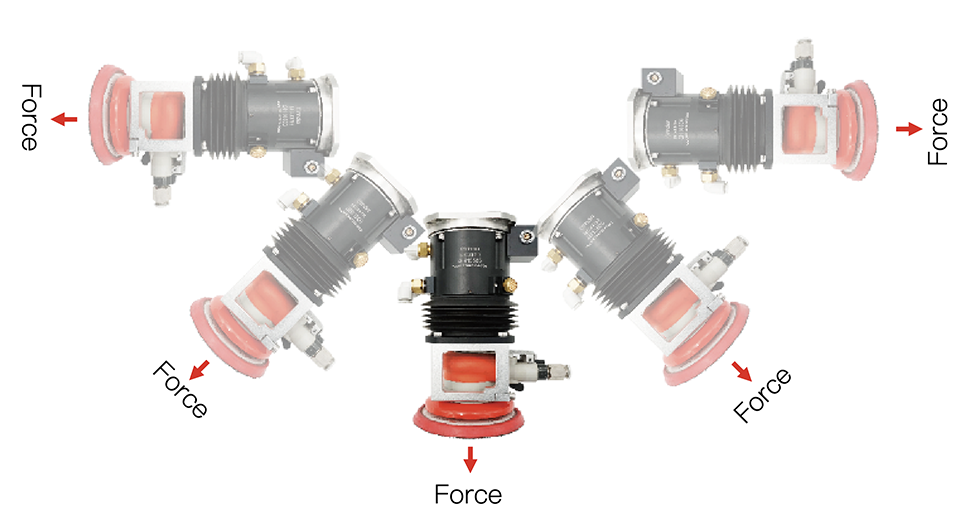
Radiala Flosanta Forto-Kontrolo
Ene de la permesita radiala flosadintervalo, iGrinder® ĉiam konservas konstantan radialan eliran forton; La flosadforto estas proporcia al la aerproviza premo. La premalĝustigo estas realigita per preciza premregula valvo aŭ proporcia valvo.
