
د دودیزو لاسوهنو او ویلډینګ په برخه کې، د صنعتي روبوټونو په کارولو کې سیالي سخته شوې ده. د پیس کولو او پالش کولو، راټولولو او ډیبرینګ په څیر غوښتنلیکونه د ګټې د ودې مهم ټکي ګرځیدلي دي، او د ځواک کنټرول ټیکنالوژي د دې ستونزو کلیدي ده.
د SRI iGrinder® هوښیار ګرینډینګ سر سیسټم ته د لید اضافه کولو سره د ځواک کنټرول او تیرولو ستونزه حل کړې. د یو خپلواک سیسټم په توګه، دا حل د روبوټ ځواک کنټرول سافټویر پورې اړه نلري. روبوټ یوازې د تدریس لارې سره سم حرکت کولو ته اړتیا لري، او د ځواک کنټرول او تیرولو دندې د ګرینډینګ سر لخوا بشپړې کیږي. کارونکي یوازې د اړتیا وړ ځواک ارزښت داخلولو ته اړتیا لري ترڅو په اسانۍ سره د هوښیار ځواک کنټرول ګرینډینګ احساس کړي.
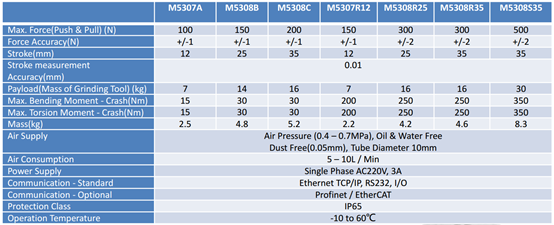
iGrinder® یو هوښیار ځواک کنټرول شوی فلوټینګ ګرینډینګ سر دی چې د سنرایز انسټرومینټس (SRI) څخه د پیټینټ ټیکنالوژۍ سره دی. مخکینۍ برخه یې په مختلفو وسیلو سمبال کیدی شي، لکه د هوا ګرینډینګ، بریښنایی سپینډل، زاویه ګرینډینګ، مستقیم ګرینډینګ، بیلټ سینډر، د تار ډراینګ ماشین، روټري فایل، او نور، چې د مختلف غوښتنلیک سناریوګانو لپاره مناسب دي.
په هرصورت، په ځینو غوښتنلیکونو کې چیرې چې د ورک پیس اندازه او موقعیت خورا توپیر لري، د ګرینډینګ کار یوازې د iGrinder® هوښیار فلوټینګ ګرینډینګ سر لخوا په ښه توګه نشي بشپړ کیدی. د ځواک کنټرول ټیکنالوژۍ او بصري ټیکنالوژۍ یوځای کولو لپاره باید بصري ټیکنالوژي اضافه شي.
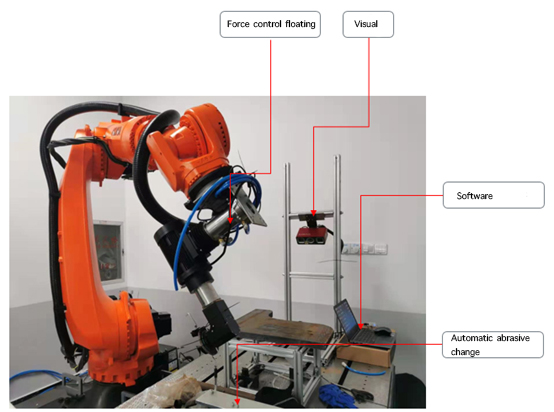
SRI او KUKA یو هوښیار ګرینډینګ سیسټم رامینځته کړی چې د ځواک کنټرول او لید سره یوځای کوي. دا سیسټم د سافټویر له لارې روبوټ، iGrinder هوښیار فلوټینګ ګرینډینګ سر او 3D کیمره کنټرولوي. د لید ټیکنالوژي په اتوماتيک ډول د ګرینډینګ ټراژيټري پلان کوي، او د ځواک کنټرول د iGrinder لخوا بشپړ کیږي.
ویډیو:
د SRI iGrinder او زموږ د غوښتنلیکونو په اړه د نورو معلوماتو لپاره موږ سره اړیکه ونیسئ!