
iGrinder® on mõeldud lihvimiseks, poleerimiseks ja ebatasasuste eemaldamiseks. Sellel on lai valik rakendusi valukojas, riistvara töötlemisel ja mittemetalliliste pindade töötlemisel. iGrinder®-il on kaks lihvimismeetodit: aksiaalne ujuvjõu juhtimine ja radiaalne ujuvjõu juhtimine. iGrinder®-i eripäradeks on kiire reageerimiskiirus, suur jõu juhtimise täpsus, mugav kasutamine ja kõrge lihvimisefektiivsus. Võrreldes traditsioonilise robotjõu juhtimise meetodiga ei pea insenerid enam tegema keerulisi jõuandurite signaali juhtimise protseduure. Pärast iGrinder®-i paigaldamist saab lihvimistööd kiiresti alustada.
Aksiaalse ujuvjõu juhtimine Lubatud aksiaalse paisumise ja kokkutõmbumise vahemikus hoiab iGrinder® alati konstantset aksiaalset väljundjõudu; iGrinder®-i aksiaalse ujuvjõu juhtimine integreerib jõuanduri, nihkeanduri ja kaldeanduri, et reaalajas mõõta selliseid parameetreid nagu lihvimisjõud, ujuvasend ja lihvimispea asend. Sellel on sõltumatu juhtimissüsteem ja jõu juhtimiseks ei ole vaja väliseid programme. Konstantset aksiaalset rõhku saab automaatselt säilitada olenemata roboti lihvimisasendist.
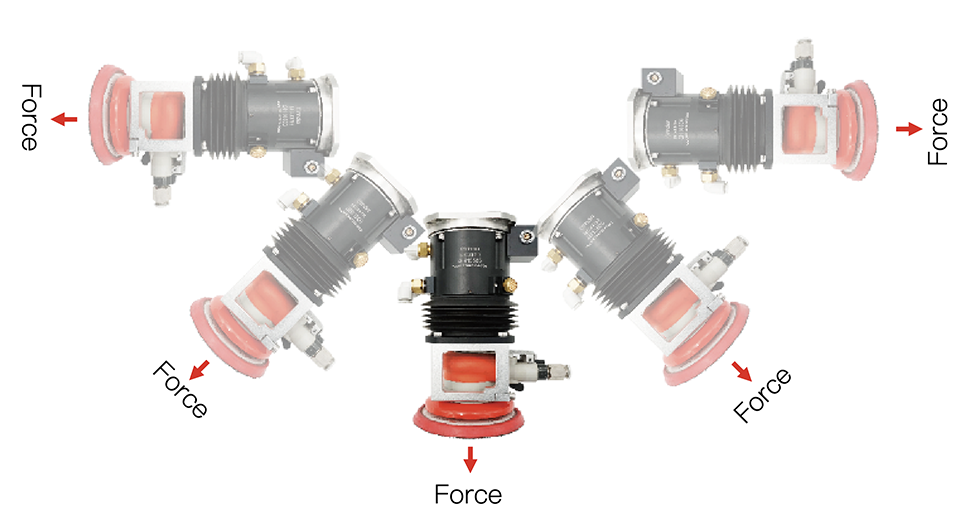
Lubatud radiaalse ujuvusvahemiku piires hoiab iGrinder® alati konstantset radiaalset väljundjõudu; ujuvusjõud on proportsionaalne õhurõhuga. Rõhu reguleerimine toimub täppisrõhu reguleerimise ventiili või proportsionaalventiili abil.
