
Productos

Cabezal de rectificado flotante radial de alta resistencia iGrinder®
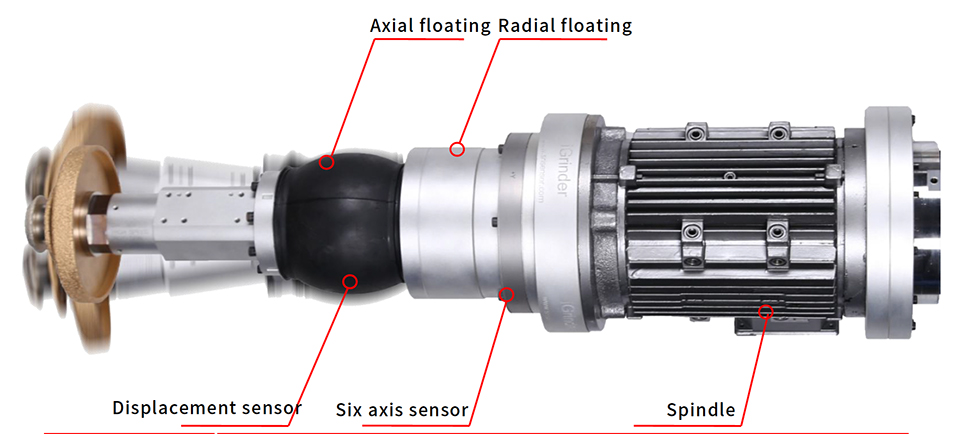
Cabezal flotante radial de alta resistencia iGrinder® con función de flotación radial integrada, función de flotación axial, sensor de fuerza de 6 ejes y sensor de desplazamiento. La fuerza de flotación radial se ajusta mediante una válvula reguladora de presión de precisión, y la fuerza de flotación axial se ajusta mediante un resorte.
La fuerza radial es constante y la magnitud de la fuerza axial está relacionada con la cantidad de compresión. Se utilizan sensores de desplazamiento para monitorizar los desplazamientos flotantes radiales y axiales y evaluar información como el estado del contacto, el desgaste de la muela abrasiva, el tamaño y la posición de la pieza. La señal del sensor de fuerza de seis ejes se puede realimentar al controlador del robot para proporcionar una fuente de señal para su software de control de fuerza (como el paquete de software de control de fuerza de ABB o KUKA).
El cabezal flotante radial de alta resistencia iGrinder® permite un rectificado de fuerza constante y soluciona eficazmente las diferencias de tamaño de la pieza y los errores de posicionamiento de las herramientas. Es adecuado para diversas aplicaciones de rectificado, como corte de compuertas, rectificado de rebabas o rectificado de cordones de soldadura. Su exclusivo diseño a prueba de polvo y sus funciones de autoprotección en condiciones de trabajo anormales ofrecen mayor seguridad a los clientes.
iGrinder® M5301F2Cabezal flotante radial de alta resistencia
| iGrinder®Cabezal flotante radial de alta resistencia | Descripción |
| Característica principal | Capacidad de flotación radial y axial. Axial 16 mm; radial +/- 6 grados. |
| La fuerza de rectificado es constante y se puede ajustar en tiempo real. Radial: 50 N a 400 N, axial: 30 N/mm. | |
| Sensor de desplazamiento integrado, retroalimentación en tiempo real del desplazamiento flotante; sensor de fuerza de seis ejes integrado, monitoreo en tiempo real de la fuerza de rectificado y otras condiciones anormales. | |
| Peso | 43 kilos |
| Rendimiento del motor | Potencia 5,5 kW, velocidad máxima 10 000 rpm, protección contra sobrecalentamiento del motor, protección contra sobrecarga. |
| Método de control | Control de E/S, comunicación Ethernet, comunicación RS232, control de pantalla táctil |
| Clase de protección | Diseño especial a prueba de polvo para entornos hostiles. |



