
Produktoj

iGrinder® Fortika Radiala Flosanta Muelkapo
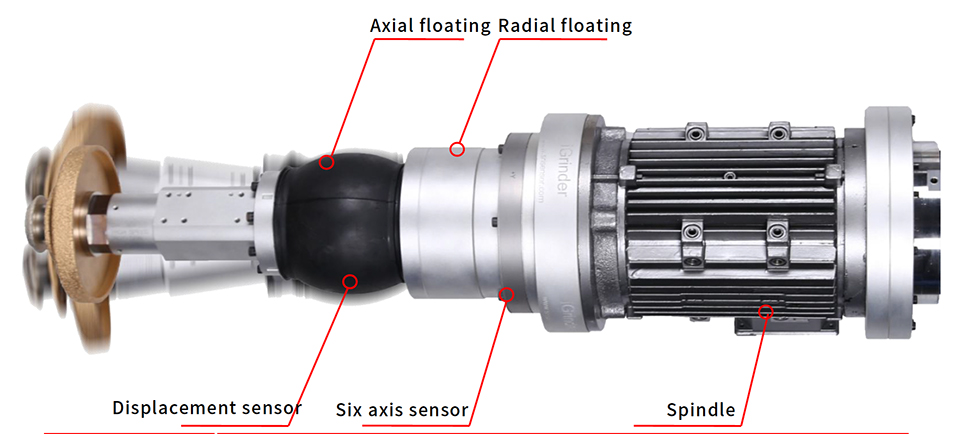
iGrinder® Peza Radiala Flosanta Kapo kun integra radiala flosanta funkcio, aksa flosanta funkcio, 6-aksa fortosensilo kaj delokiĝsensilo. La radiala flosanta forto estas agordita per preciza premregula valvo, kaj la aksa flosanta forto estas agordita per risorto.
La radiala forto estas konstanta, kaj la grando de la aksa forto rilatas al la kvanto de kunpremo. Delokiĝsensiloj estas uzataj por monitori la radialajn kaj aksajn ŝvebajn delokigojn por taksi informojn kiel kontaktostato, eluziĝo de muelrado, grandeco de laborpeco kaj pozicio de laborpeco. La ses-aksa fortosensila signalo povas esti resendita al la robotregilo por provizi signalfonton por ĝia fortokontrola programaro (kiel ekzemple la fortokontrola programarpakaĵo de ABB aŭ KUKA).
La iGrinder® Peza Radiala Flosanta Kapo povas facile atingi konstantan forton de muelado, kaj sukcese solvi la problemon de la grandecdiferenco de la laborpeco kaj la pozicia eraro de la ilo. Taŭga por diversaj muelaplikoj kiel ekzemple pordotranĉado, fulmmuelado aŭ veldkudromuelado. Ĝia unika polvorezista dezajno kaj memprotektaj funkcioj en nenormalaj laborkondiĉoj igas klientojn senti sin pli memfidaj.
iGrinder® M5301F2 Fortika Radiala Flosanta Kapo
| iGrinder® Fortika Radiala Flosanta Kapo | Priskribo |
| Ĉefa Trajto | Kaj radiala kaj aksa floskapablo. Aksa 16mm; radiala +/- 6 gradoj |
| La muelforto estas konstanta kaj povas esti alĝustigita en reala tempo. Radia 50N ĝis 400N, aksa 30N/mm | |
| Integra delokiĝsensilo, realtempa retrosciigo de ŝveba deŝovo; integra ses-aksa fortosensilo, realtempa monitorado de muelada forto kaj aliaj nenormalaj kondiĉoj | |
| Pezo | 43 kilogramoj |
| Motora Elfaro | Povumo 5.5kw, maksimuma rapido 10000rpm, protekto kontraŭ trovarmiĝo de la motoro, protekto kontraŭ troŝarĝo |
| Kontrola Metodo | I/O-kontrolo, Ethernet-komunikado, RS232-komunikado, tuŝekrana kontrolo |
| Protekta Klaso | Speciala polvorezista dezajno por severaj medioj |



