Các sản phẩm
Cảm biến lực/mô-men xoắn 6 trục
Cảm biến mô-men xoắn khớp robot
Cảm biến lực đơn trục và đặc biệt
Cảm biến lực đa trục để kiểm tra độ bền tự động
Cảm biến lực đa trục dùng cho thử nghiệm va chạm ô tô
DAS cho thử nghiệm độ bền ô tô
iGrinder®
Mài điều khiển lực nổi trục iGrinder®
Mài điều khiển lực hướng tâm iGrinder®
Dụng cụ mài
Các nhạc cụ
Ứng dụng
Ô tô
An toàn ô tô
Kỹ thuật robot
Thuộc về y học
Kiểm tra chung
Phục hồi chức năng
Chế tạo
Tự động hóa
Hàng không vũ trụ
Nông nghiệp
Ấn phẩm
Nghiên cứu và phát triển
Ủng hộ
Danh mục
Sổ tay cảm biến
Sổ tay hướng dẫn sử dụng thiết bị
Hướng dẫn sử dụng iGrinder
Phần mềm
BẢO TRÌ
Câu hỏi thường gặp
Tin tức
Tin tức công ty
Tin tức ngành
Giới thiệu về chúng tôi
Hồ sơ công ty
Chứng nhận
Liên hệ với chúng tôi
Chinese
English
Ứng dụng
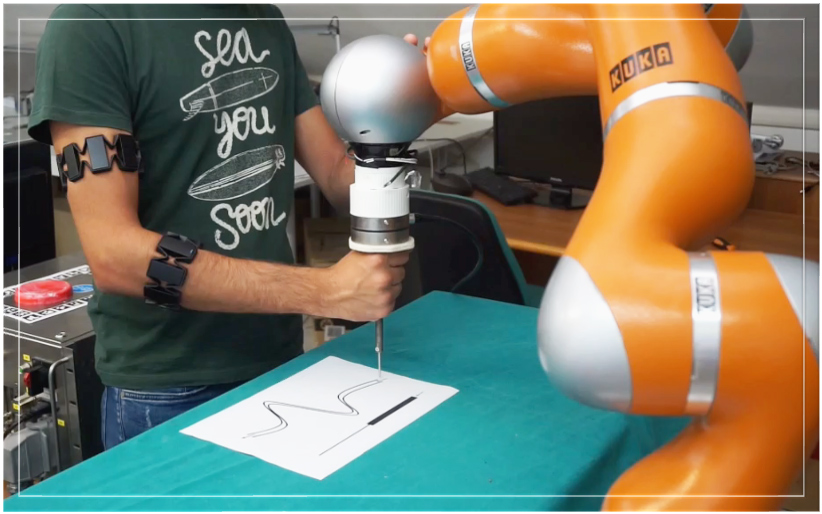
Cảm biến lực F/T 6 trục SRI với Robot cộng tác KUKA LWR4+
Sự kết hợp của bộ chuyển đổi lực sáu trục đầu cuối và tín hiệu căng cơ bề mặt
Để lại lời nhắn của bạn:
Viết tin nhắn của bạn ở đây và gửi cho chúng tôi.
Nhấn enter để tìm kiếm hoặc ESC để đóng
English
French
German
Portuguese
Spanish
Russian
Japanese
Korean
Arabic
Irish
Greek
Turkish
Italian
Danish
Romanian
Indonesian
Czech
Afrikaans
Swedish
Polish
Basque
Catalan
Esperanto
Hindi
Lao
Albanian
Amharic
Armenian
Azerbaijani
Belarusian
Bengali
Bosnian
Bulgarian
Cebuano
Chichewa
Corsican
Croatian
Dutch
Estonian
Filipino
Finnish
Frisian
Galician
Georgian
Gujarati
Haitian
Hausa
Hawaiian
Hebrew
Hmong
Hungarian
Icelandic
Igbo
Javanese
Kannada
Kazakh
Khmer
Kurdish
Kyrgyz
Latin
Latvian
Lithuanian
Luxembou..
Macedonian
Malagasy
Malay
Malayalam
Maltese
Maori
Marathi
Mongolian
Burmese
Nepali
Norwegian
Pashto
Persian
Punjabi
Serbian
Sesotho
Sinhala
Slovak
Slovenian
Somali
Samoan
Scots Gaelic
Shona
Sindhi
Sundanese
Swahili
Tajik
Tamil
Telugu
Thai
Ukrainian
Urdu
Uzbek
Vietnamese
Welsh
Xhosa
Yiddish
Yoruba
Zulu