Продукти
6-осьові тензодатчики сили/крутного моменту
Датчики крутного моменту з'єднань робота
Одноосьові та спеціальні тензодатчики
Багатоосьові тензодатчики для автоматичного випробування на міцність
Багатоосьові тензодатчики для автокраш-тестів
DAS для випробування на міцність автомобілів
iGrinder®
iGrinder® Осьове плаваюче шліфування з контролем сили
iGrinder® Радіальне шліфування з контролем сили
Шліфувальні інструменти
Інструменти
Застосування
Автомобільна промисловість
Безпека автомобілів
Робототехніка
Медичний
Загальне тестування
Реабілітація
Виробництво
Автоматизація
Аерокосмічна галузь
Сільське господарство
Публікації
Дослідження та розробки
Підтримка
Каталог
Інструкція з експлуатації датчика
Інструкція з експлуатації приладу
Інструкція з експлуатації iGrinder
Програмне забезпечення
Технічне обслуговування
Найчастіші запитання
Новини
Новини компанії
Новини галузі
Про нас
Профіль компанії
Сертифікати
Зв'яжіться з нами
Chinese
English
Застосування
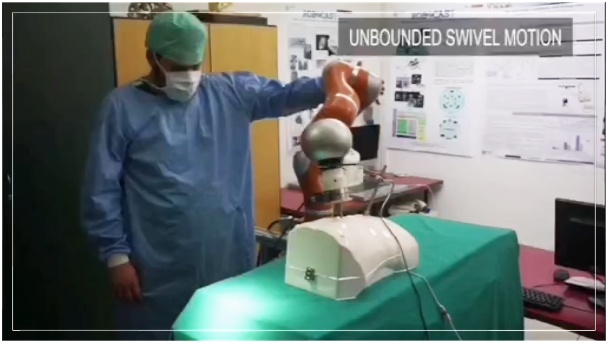
6-осьовий F/T перетворювач SRI для хірургічного колаборативного робота
Телекерований малоінвазивний хірургічний робот
Залиште своє повідомлення:
Напишіть своє повідомлення тут і надішліть його нам.
Натисніть Enter для пошуку або ESC для закриття
English
French
German
Portuguese
Spanish
Russian
Japanese
Korean
Arabic
Irish
Greek
Turkish
Italian
Danish
Romanian
Indonesian
Czech
Afrikaans
Swedish
Polish
Basque
Catalan
Esperanto
Hindi
Lao
Albanian
Amharic
Armenian
Azerbaijani
Belarusian
Bengali
Bosnian
Bulgarian
Cebuano
Chichewa
Corsican
Croatian
Dutch
Estonian
Filipino
Finnish
Frisian
Galician
Georgian
Gujarati
Haitian
Hausa
Hawaiian
Hebrew
Hmong
Hungarian
Icelandic
Igbo
Javanese
Kannada
Kazakh
Khmer
Kurdish
Kyrgyz
Latin
Latvian
Lithuanian
Luxembou..
Macedonian
Malagasy
Malay
Malayalam
Maltese
Maori
Marathi
Mongolian
Burmese
Nepali
Norwegian
Pashto
Persian
Punjabi
Serbian
Sesotho
Sinhala
Slovak
Slovenian
Somali
Samoan
Scots Gaelic
Shona
Sindhi
Sundanese
Swahili
Tajik
Tamil
Telugu
Thai
Ukrainian
Urdu
Uzbek
Vietnamese
Welsh
Xhosa
Yiddish
Yoruba
Zulu