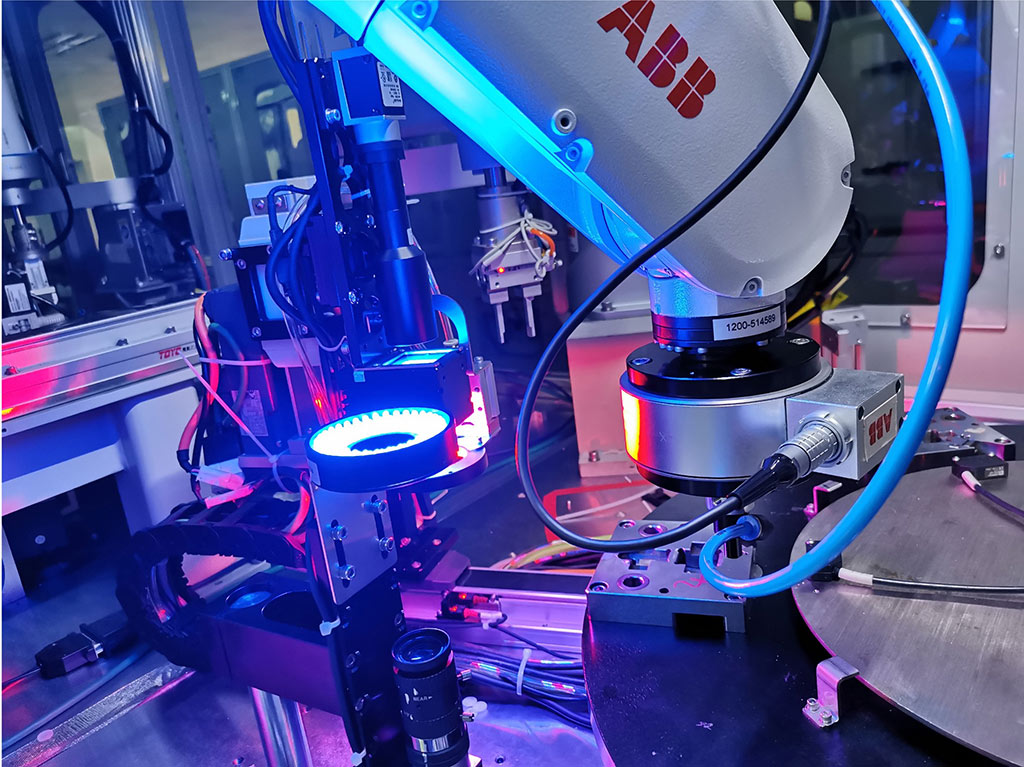
ABB რობოტის ძალის მართვის მექანიზმის შეკრება. 6 ღერძიანი ძალის/მომენტის სიგნალის რეალურ დროში უკუკავშირი.